
点云曲率计算是计算机图形学和几何处理中的一个重要问题,它涉及到从三维点云数据中估计曲面的局部曲率,曲率是描述曲面在某一点处弯曲程度的量,它可以用于特征检测、曲面重建、分割和其他几何处理任务。

对于点云中的每个点,我们可以通过以下步骤计算其曲率:
1、邻域选择:我们需要为每个点选择一个邻域,这个邻域通常是一个球体,其中包含距离该点一定半径内的所有其他点,邻域的大小会影响曲率估计的准确性和稳定性。
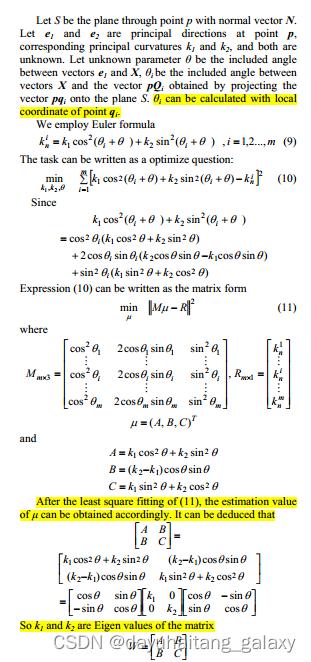
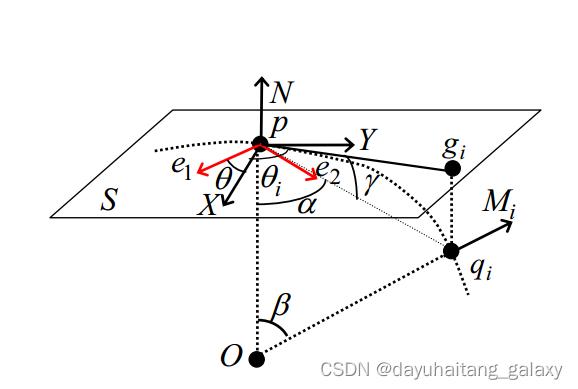
2、局部曲面拟合:在选择了邻域之后,我们需要用一个数学模型来近似这个邻域内的点集,常用的模型包括平面、二次曲面、多项式曲面或隐式曲面等,通过最小化误差函数(最小二乘法),我们可以确定模型参数。
3、曲率计算:一旦我们有了局部曲面的数学描述,我们就可以计算曲率,对于二维曲面,我们通常计算主曲率(k1和k2),它们是曲面在某一点处沿任意方向的最大和最小法曲率,主曲率可以用来计算平均曲率H和高斯曲率K:
平均曲率 ( H = frac{k1 + k2}{2} )
高斯曲率 ( K = k1 cdot k2 )
4、数值方法:在实际计算中,我们通常使用数值方法来求解曲率,如果我们使用多项式曲面拟合,我们可以通过求解曲面的第一和第二基本形式的系数来计算曲率,这些系数可以通过对曲面方程进行微分来获得。
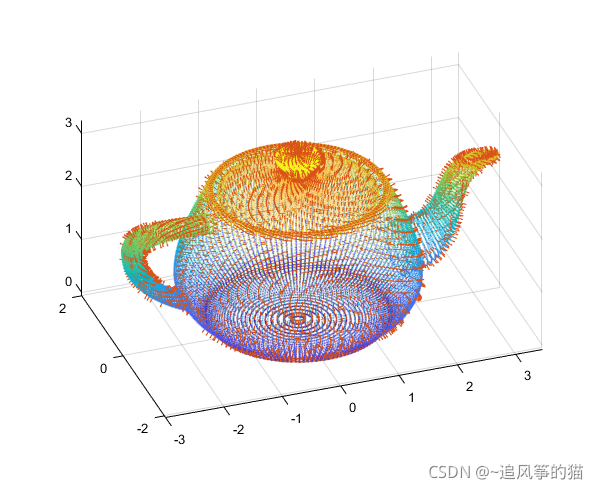
5、结果分析:计算出每个点的曲率后,我们可以分析这些值来检测曲面的特征,如边缘、角点或平滑区域。
在实际操作中,点云曲率计算可能会受到噪声、采样不均匀和数据缺失等问题的影响,研究人员提出了许多不同的方法来提高曲率估计的鲁棒性和准确性,例如使用移动最小二乘法(MLS)进行局部曲面拟合,或者使用机器学习技术来预测曲率。
这里提供的是一个概述性的解答,具体的实现细节和数学推导可能会非常复杂,需要根据具体的应用场景和需求来选择合适的方法和算法。
【版权声明】:本站所有内容均来自网络,若无意侵犯到您的权利,请及时与我们联系将尽快删除相关内容!


发表回复