
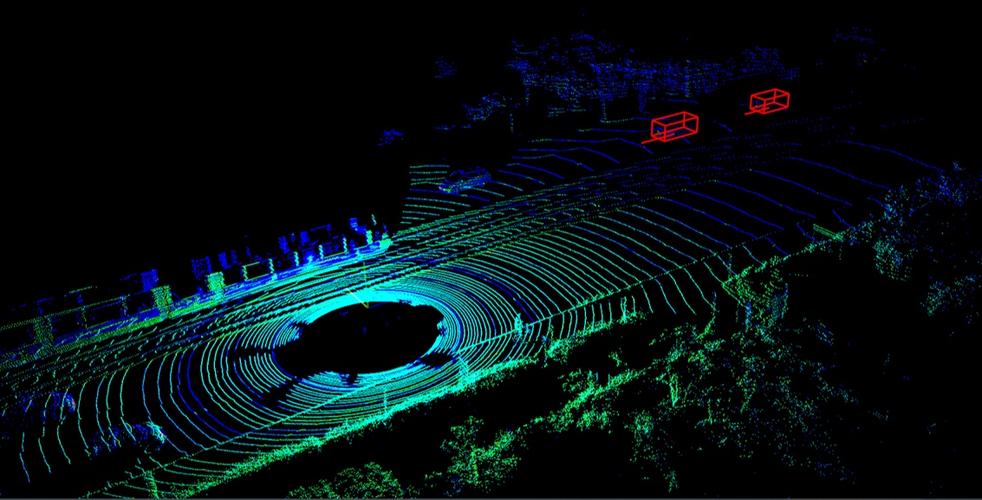
点云图像识别是计算机视觉领域的一个重要研究方向,它主要涉及到从三维空间中获取的点云数据中识别和理解物体,点云数据通常由三维扫描设备(如激光扫描仪、深度相机等)生成,包含了物体表面的几何信息,在许多应用场景中,如自动驾驶、机器人导航、工业检测等,点云图像识别技术发挥着关键作用。

点云图像识别的主要步骤如下:
1、数据预处理:首先需要对原始点云数据进行预处理,包括去除噪声、滤波、平滑、降采样等操作,以提高数据质量和减少计算复杂度。
2、特征提取:从点云数据中提取有用的特征,这些特征可以包括几何特征(如法向量、曲率、形状描述符等)、颜色特征、纹理特征等,特征提取的目的是将高维的点云数据转换为低维的特征向量,便于后续的分类和识别。
3、特征匹配:将提取的特征与预先定义的特征库进行匹配,以确定点云中的物体类别,这一步骤通常涉及到特征空间的搜索和相似度度量,可以使用各种机器学习算法(如支持向量机、随机森林等)或深度学习方法(如卷积神经网络)来实现。
4、物体定位和姿态估计:在识别出物体类别后,需要进一步确定物体在点云中的位置和姿态,这可以通过计算物体关键点的坐标、拟合模型参数等方法实现,对于复杂的场景,可能需要使用多视图融合、语义分割等技术来提高定位精度。
5、结果优化和后处理:根据实际应用需求,对识别结果进行优化和后处理,如去除误识别、合并重叠物体、修复缺失部分等,还可以利用上下文信息、先验知识等来提高识别准确性。
点云图像识别是一个涉及多个步骤的复杂过程,需要综合运用各种计算机视觉技术和算法,随着深度学习技术的发展,越来越多的研究开始关注如何利用深度神经网络(如PointNet、DGCNN等)直接处理点云数据,以实现端到端的识别和理解。
【版权声明】:本站所有内容均来自网络,若无意侵犯到您的权利,请及时与我们联系将尽快删除相关内容!


发表回复