
端到端场景详解

在现代的无人机(UAV)技术中,飞行控制系统(Flight Control System, FCS)是至关重要的组成部分,它负责确保无人机能够稳定、安全地飞行,并执行预定的任务,随着机器学习技术的发展,将其应用到飞控系统中已成为研究的热点之一,旨在提高无人机的自主性、适应性和智能水平,本文将详细探讨一种机器学习端到端的场景,即使用机器学习算法直接从原始数据到最终控制输出的流程。
系统架构
输入层
传感器数据:包括IMU(惯性测量单元)、GPS、视觉传感器等的数据。
环境信息:可能包括天气条件、障碍物信息等。
处理层
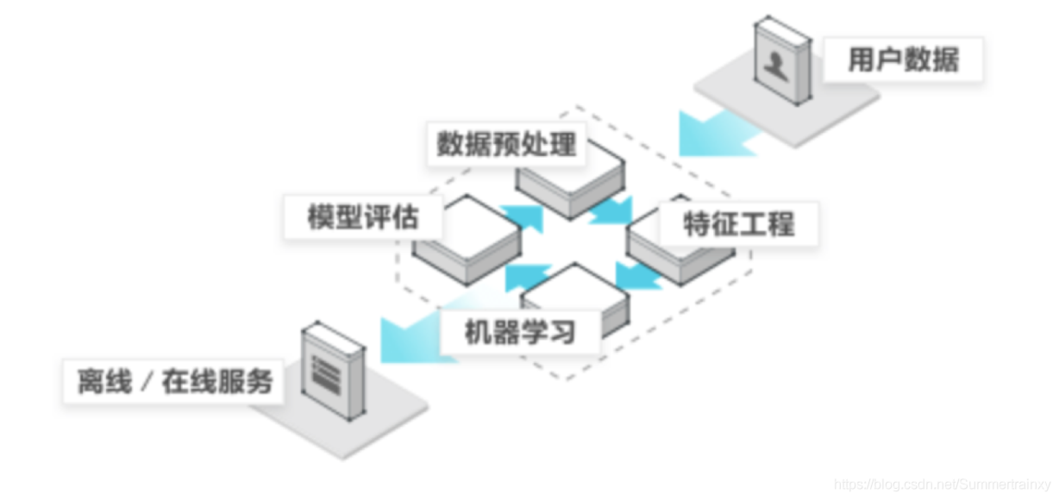
数据预处理:对原始数据进行清洗、归一化等操作。
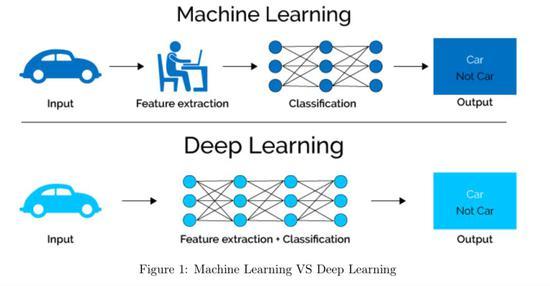
特征提取:利用深度学习模型自动提取相关特征。
决策制定:基于提取的特征,使用学习算法进行飞行决策。
输出层
控制指令:生成用于驱动无人机执行机构(如电机、舵机等)的控制信号。
算法选择
监督学习:通过大量标记的训练数据来训练模型,使其学会如何根据输入数据产生正确的控制输出。
强化学习:通过与环境的交互获得反馈,不断调整策略以优化长期回报。
实现步骤
1、数据采集:收集各种飞行条件下的传感器数据和相应的控制输出。
2、数据标注:为监督学习准备标签,或者定义强化学习中的奖励函数。
3、模型训练:选择合适的机器学习模型,并用收集到的数据进行训练。
4、仿真测试:在仿真环境中测试训练好的模型,评估其性能。
5、实际飞行测试:将模型部署到实际的无人机上,进行飞行测试和调优。
性能评估
稳定性:无人机在不同飞行条件下的稳定性表现。
准确性:完成任务的准确性,如航点导航、避障等。
适应性:面对未知环境和突发情况的适应能力。
实时性:系统处理速度是否满足实时飞行控制的需求。
挑战与对策
数据量和质量:需要大量的高质量数据进行训练,可通过仿真环境和实际飞行相结合的方式解决。
泛化能力:提高模型的泛化能力,以便应对未见过的情况。
安全性:确保在机器学习模型失效时有备用的安全措施。
未来展望
随着算法和硬件的进步,未来的飞控机器学习系统将更加智能和自适应,能够处理更复杂的任务和环境,同时保证更高的安全性和可靠性。
相关问答
Q1: 机器学习在飞控系统中有哪些潜在的风险?
A1: 机器学习在飞控系统中的潜在风险主要包括:
模型过拟合:模型可能在训练数据上表现良好,但在新的环境中泛化能力差。
数据偏见:如果训练数据存在偏见,模型可能会学到错误的行为模式。
安全性问题:机器学习模型可能在某些极端情况下做出危险的决策。
解释性差:深度学习模型通常被视为“黑盒”,难以理解其内部决策逻辑。
实时性要求:机器学习模型可能需要大量的计算资源,可能无法满足实时性的要求。
Q2: 如何提高机器学习飞控系统的可靠性和安全性?
A2: 提高机器学习飞控系统的可靠性和安全性可以采取以下措施:
多元化训练数据:确保训练数据覆盖广泛的飞行条件和异常情况。
模型验证与测试:在仿真环境和实际飞行中充分测试模型的性能和稳定性。
冗余系统设计:设计冗余的飞控系统,以便在机器学习系统失效时接管控制。
持续监控与更新:监控系统的性能,并根据实际飞行数据不断更新和优化模型。
安全约束:在机器学习算法中引入安全约束,确保控制指令在安全范围内。
【版权声明】:本站所有内容均来自网络,若无意侵犯到您的权利,请及时与我们联系将尽快删除相关内容!


发表回复