
导航点云三维地图的修订记录涉及、改进功能、新增功能以及修订时间等,接下来将详细介绍导航点云三维地图的修订记录:

1、
基础测绘更新:在基础测绘方面,激光雷达(LiDAR)和无人机技术已经变革了作业概念和效率,过去十年间,这些技术得到了广泛认同,并大量应用于基础测绘、城市三维建模等领域,显著降低了高精度测绘的成本。
2、改进功能
数据处理流程:对于激光雷达数据,其处理系统目前相对不成熟,主要使用的软件包括Terrasolid等,而硬件厂商提供的软件大疆智图和飞马的无人机管家专业版等也日渐成熟,这些软件在点云数据处理上具备自动地面点检测和分类等功能,为点云数据的精确应用提供了基础。
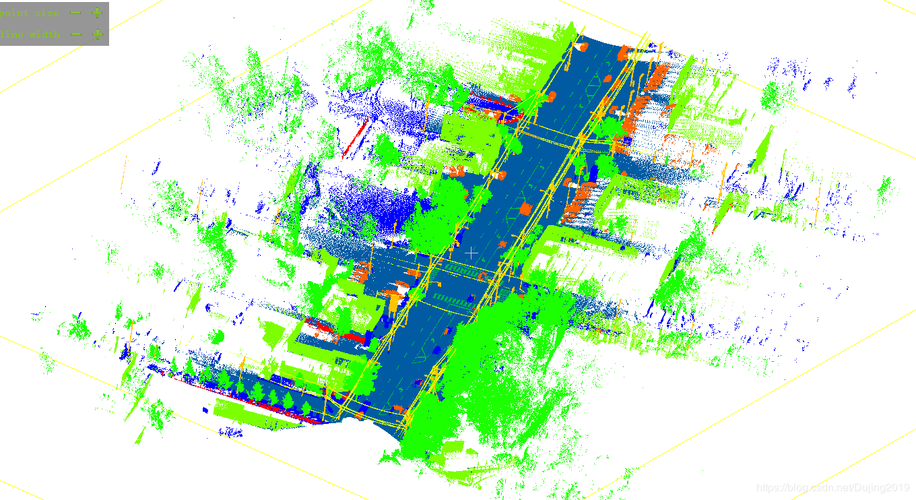
点云数据可视化:点云数据主要保存为.las格式,除了高程值,还包含激光强度、扫描角度、返回次数等信息,这些信息对可视化非常重要,图新地球·桌面端等软件提供了丰富的点云查看、分类和提取工具,如点云三维可视化、赋色、分类等。
3、新增功能
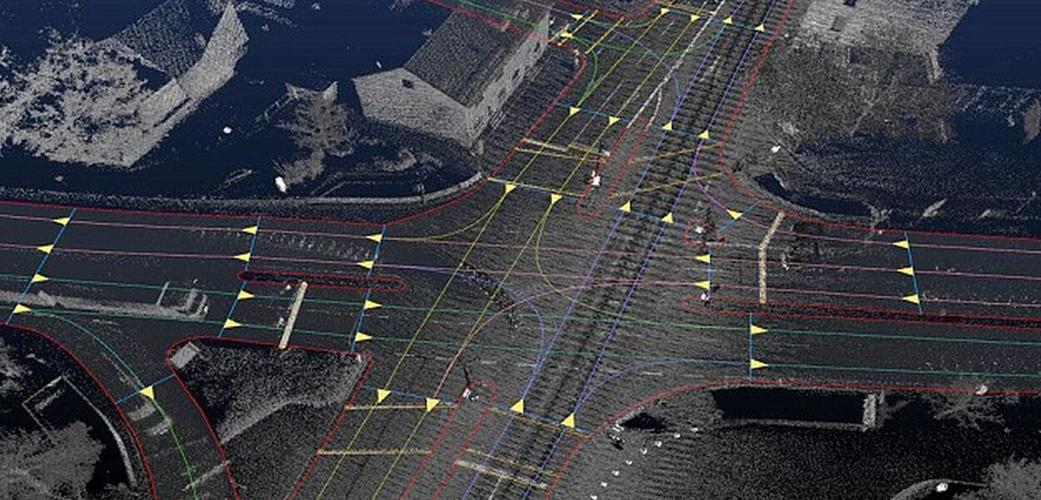
实时三维地图构建:利用ROS(机器人操作系统)和PCL(点云库)等工具,可以实现基于ORB SLAM2的点云地图构建,这涉及到关键帧的拼接,形成全局点云地图,为导航提供精确的空间数据支撑。
Web端显示与导航:通过使用ros3d.js等前端库,可以在Web端实现如TurtleBot3机器人的实时显示和导航功能,结合三维点云数据,提升室内外导航定位的精度和用户体验。
4、修订时间
文档和软件版本:根据搜索结果,我们可以看到导航点云三维地图的技术不断迭代更新,图新地球·桌面端4.3.1版本和LocaSpace Viewer点云模块的更新都为用户提供了更加丰富和精确的三维地图数据。
导航点云三维地图的修订记录详细记录了其在基础测绘更新、数据处理流程、点云数据可视化、实时三维地图构建以及Web端显示与导航等方面的更新和改进,随着技术的不断发展,我们期待未来有更多创新的功能被引入,以为用户带来更好的体验和更精确的导航服务。

【版权声明】:本站所有内容均来自网络,若无意侵犯到您的权利,请及时与我们联系将尽快删除相关内容!


发表回复